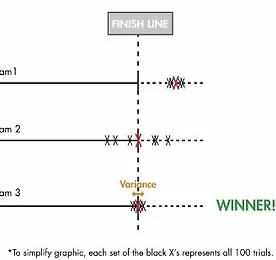
엔지니어 썸네일형 리스트형 [공유] 영상처리 엔지니어 면접 질문 모음 feature란 영상의 특징값(feature)이란 점(point), 엣지(edge, 경계선, 외곽선), 코너(corner, 모서리), 질감(texture), 색상(color)처럼 다른 부분과 구분되어 두드러지는 성질을 의미 특징 벡터(feature vectors) : high-level 영상 인식에 사용될 의미있는/정제된 정량적 특징 정보 Convolution 정의: 하나의 함수와 또 다른 함수를 반전 이동한 값을 곱한 다음 구간에 대해 적분하여 새로운 함수를 구하는 수학 연산자 시스템에 메모리가 있는 경우 한 시스템의 출력이 현재 입력에 의해서만 결정되는 것이 아닌 이진입력에 의해서도 영향을 받기 때문에, 그에 대한 출력을 나타내기 위해 하는 연산. Convolution이 나오게 된 이유는, 신호들 간.. 더보기 [칼만필터] 4. 최적 상태 추정 알고리즘(칼만필터 알고리즘) Understanding Kalman Filters, Part 4: Optimal State Estimator Algorithm 자율주행 차량의 위치 추정 예제에서, 우리는 single-state(position) 시스템에 대해 위 그림과 같이 모델링하였다. 앞의 포스팅에서, 우리는 최적 비편향 추정을 할 수 있는 칼만필터를 통해 차량의 위치를 최소의 분산 값과 함께 추정할 수 있다고 했다. 최적 추정은 예측 확률 분포와 측정 확률 분포를 이용해 구할 수 있다. 이 두 확률 밀도 함수(pdf)의 곱은 다음과 같은 이산 칼만필터의 식(discrete kalman filter)과 연관된다. 이전 포스팅의 상태 관측기(state observer)의 식과 비교해보자. 칼만필터는상태 관측기의 한 종류이며, 확률론.. 더보기 [칼만필터]] 3. 최적 상태 추정기(Optimal State Estimator) Understanding Kalman Filters, Part 3: Optimal State Estimator 각 팀이 여러 번에 시도에서 finish line에 도달한다고 했을 때, 가장 좋은 결과를 낸 팀은 Team 3 이다. 결과 분포의 평균이 목표 값과 가장 가깝고, 분포의 분산이 가장 작기 때문이다. 차량의 속도가 입력, 차량의 위치가 출력인 시스템을 가정해보자. 위 문제에서 y를 정확히 구하는 것이 중요하다. 만약 GPS를 쓴다면, 이는 굉장히 noisy하므로, Car dynamics 수식에 측정 오차 v_k를 넣어준다. 마찬가지로, 바람이나 차량 속도 변화와 같은 과정 오차 w_k가 있다. 모든 오차는 random variable이다.확률 이론을 통해 오차들의 특성을 반영해서 설계할 수 있다.. 더보기 [칼만필터] 2. 상태 관측기(State Observer) Understanding Kalman Filters, Part 2: State Observers 상태 추정 우리가 직접적으로 측정하지 못하는 상태를 추정하는 것 말한다. 추정 상태는 수식에서 문자 위에 hat을 씌워서 표현한다. ###예시1 지구에서 달으로 가기 위해 로켓 엔진의 내부 온도를 알아야 한다. 내부 온도는 로켓에 얼마나 연료를 주입해야 하는지 알려주기 때문이다. 내부 온도를 직접적으로 측정할 수는 없고, 대신 외부 온도는 측정 가능하다. 즉, 우리는 주입 연료량과 외부 온도를 알 수 있다. 내부 온도를 추정하기 위해서는 더 많은 정보가 필요하다. 우리가 연료 주입량과 외부 온도와의 수학적 관계를 안다면, 주입한 연료에 대한 외부 온도의 추정 값을 구할 수 있다. 수학적 모델이 엔진 내부 온도.. 더보기 [칼만필터] 1. 칼만필터란 무엇인가? Understanding Kalman Filters, Part 1: Why Use Kalman Filters? 칼만필터 칼만필터는 최적 추정 알고리즘이다 ###예시1 지구에서 달으로 가기 위해 로켓 엔진의 내부 온도를 실시간으로 추정하고자 한다. 문제는 엔진 내부에 센서를 부착하면 높은 온도로 인해 녹는다는 것이다. 따라서, 센서는 엔진 표면에만 부착 가능하다. 우리는 칼만필터를 통해 우리가 측정 가능한 데이터로부터 측정 불가능한 데이터을 추정할 수 있다. ###예시2 차량의 실시간 위치를 알기 위해 사용되는 내장(on-board) 센서로는 대표적인 3가지가 있다. IMU는 관성 센서를 이용하여 차량의 가속도와 각속도를 측정한다. Odometer은 차량의 상대적 위치를 제공한다. GPS 수신기는 차량의 .. 더보기 이전 1 다음